| page |
description |
| 0 |
ctrl cabinet layout |
| 1 |
breakers |
| 2 |
ladder logic |
| 3 |
watchdog |
| 4 |
brakes |
| 5 |
ldCells,load
metering,autorelease |
| 6 |
fans |
| 7 |
little start computer |
| 8 |
pcu |
| 9 |
grounding |
| com |
communications |
| mot |
motor installation |
| dio_1 dio_2 |
digital i/o boards |
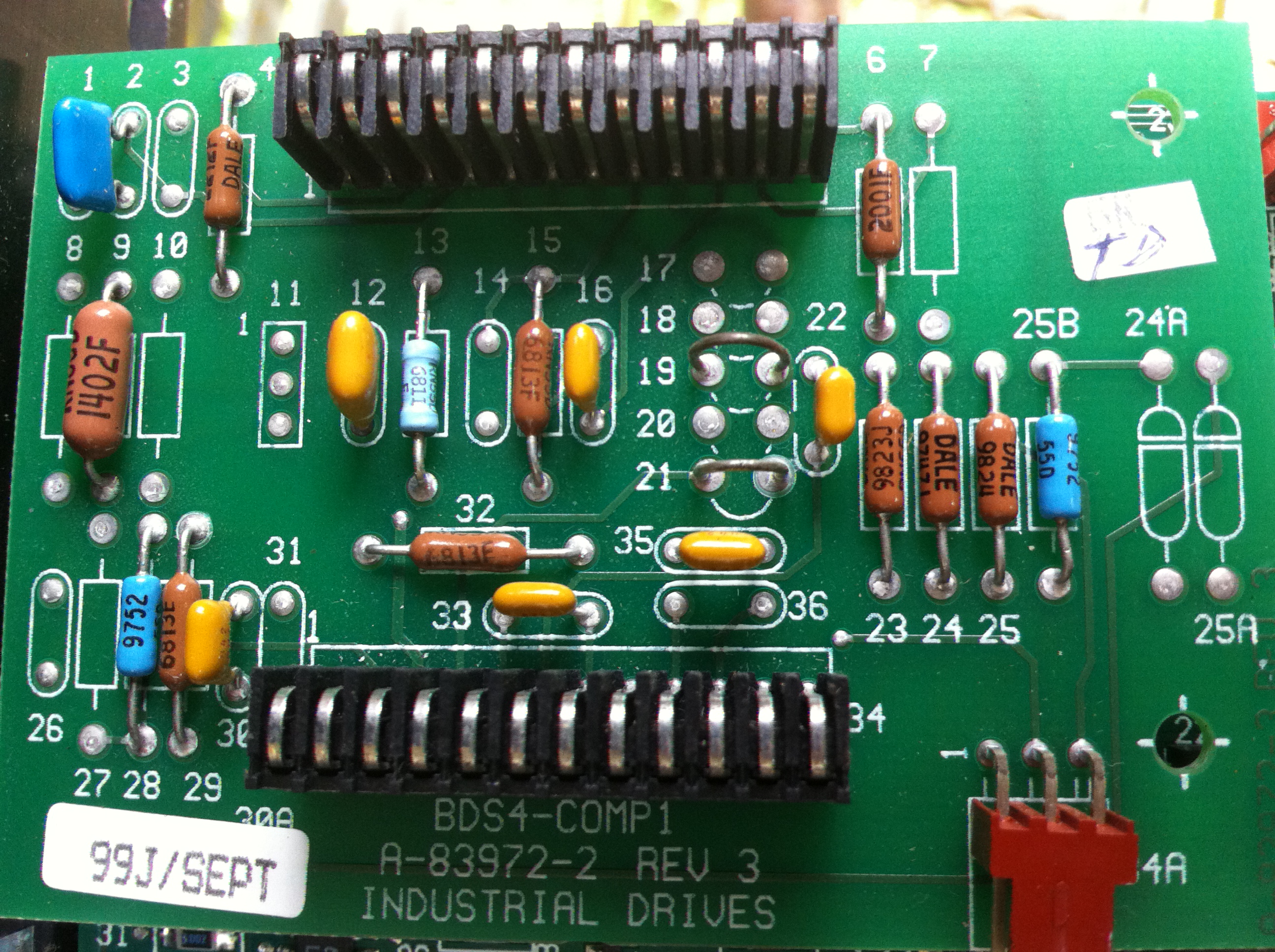
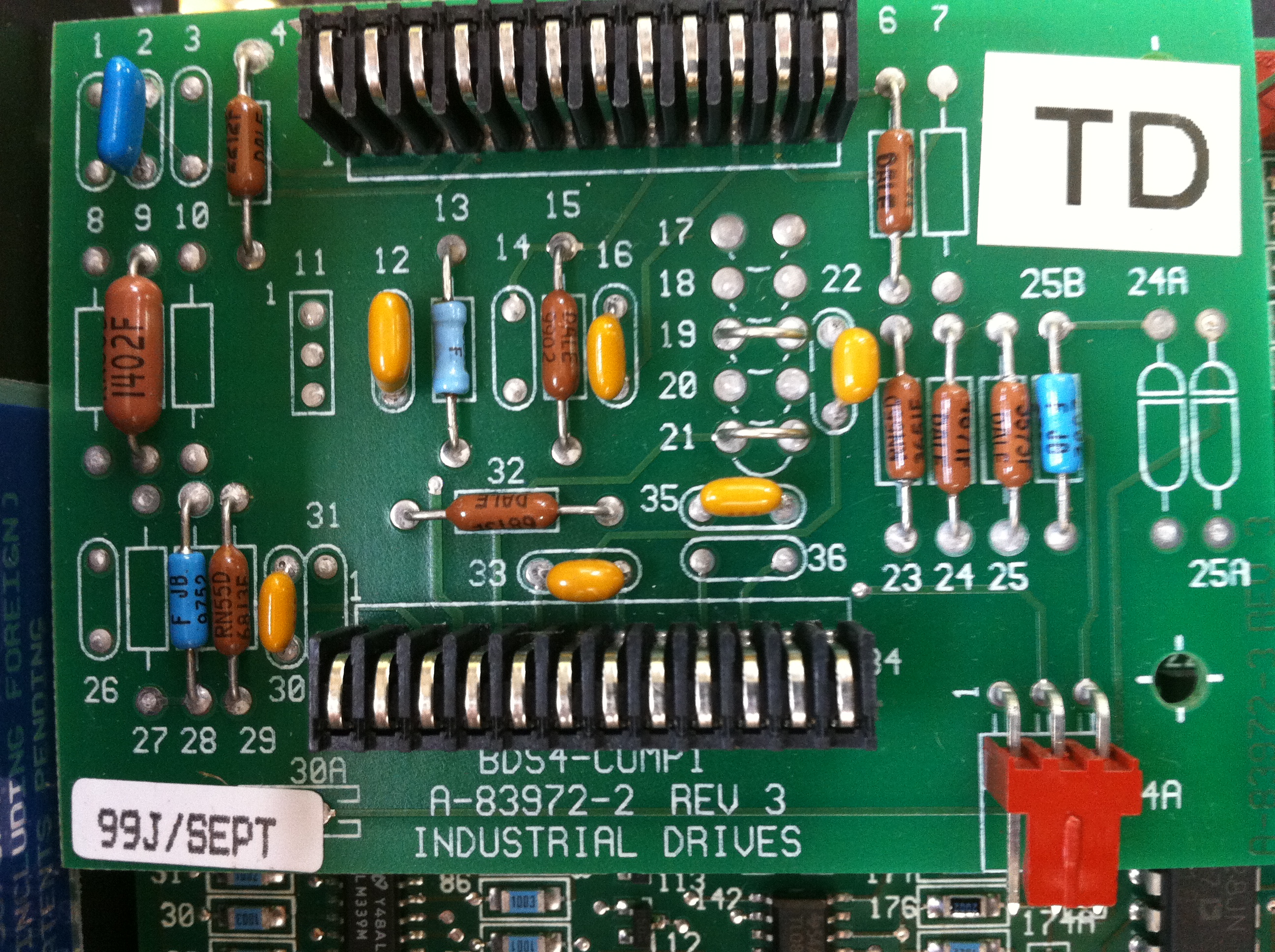
| td12 |
td 4 |
td8 |
|
| power @box b1 cable 5
in control room |
|||
| power @ box 12-7 before
patch to each huffman box (n) is fiber number in 12-7 |
-17.8 (3) |
-17.3 (5) |
-18.5 (4) |
| power @ 1 sec tick
rcvr |
-18.6 |
-18.1 |
-19.8 |
| date |
tieRefUsed [td12,4,8] |
tdAutoTrk.h |
Offsets |
Notes |
| 07apr07 |
14.9276,15.4311,12.3753 |
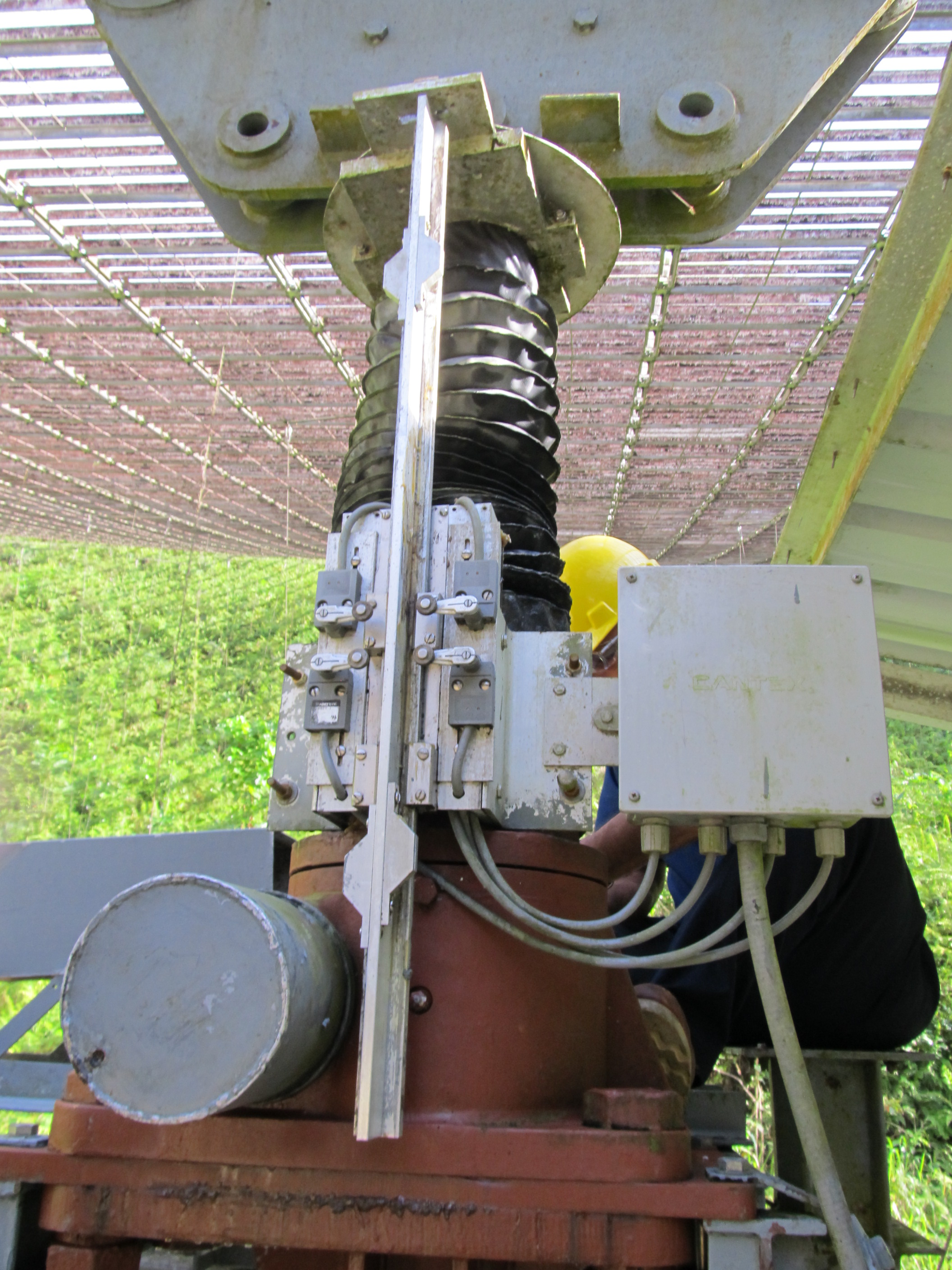
14.875,14.616,13.243 | .05257,.81511,-.8677 |
lead from corners, laser
shack removed. Painting project weight on platform. |
| 06dec07 |
15.1140,15.7028,11.9171 | 14.875,14.616,13.243 | .2390,1.0868,-1.3259 |
after 06dec07 tilt run.
Painting project weight off platform. |
| 09dec07 |
15.1140,15.2028,15.1670 | 14.875,14.616,13.243 |
.2390,.5868,1.9241 |
After td nuts moved to
equalize td positions. |
| 10dec07 |
15.0718,15.3196,15.0926 |
14.875,14.616,13.243 |
.1968,.7036,1.8496 |
Updated using the first two
aswings done on 10dec07. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}